日前,由中国造船工程学会主办,哈尔滨工程大学承办的首届世界大学生水下机器人大赛在青岛落幕。经评审,哈尔滨工程大学领航鲸队、燕山大学智慧海洋创新团队、哈尔滨工程大学星魂队分别获得AUV赛道冠军、亚军、季军;国防科技大学破浪队、国防科技大学乘风队、俄罗斯涅维尔斯基国立海事大学分获ROV赛道冠军、亚军、季军。

世界大学生水下机器人大赛在青岛落幕
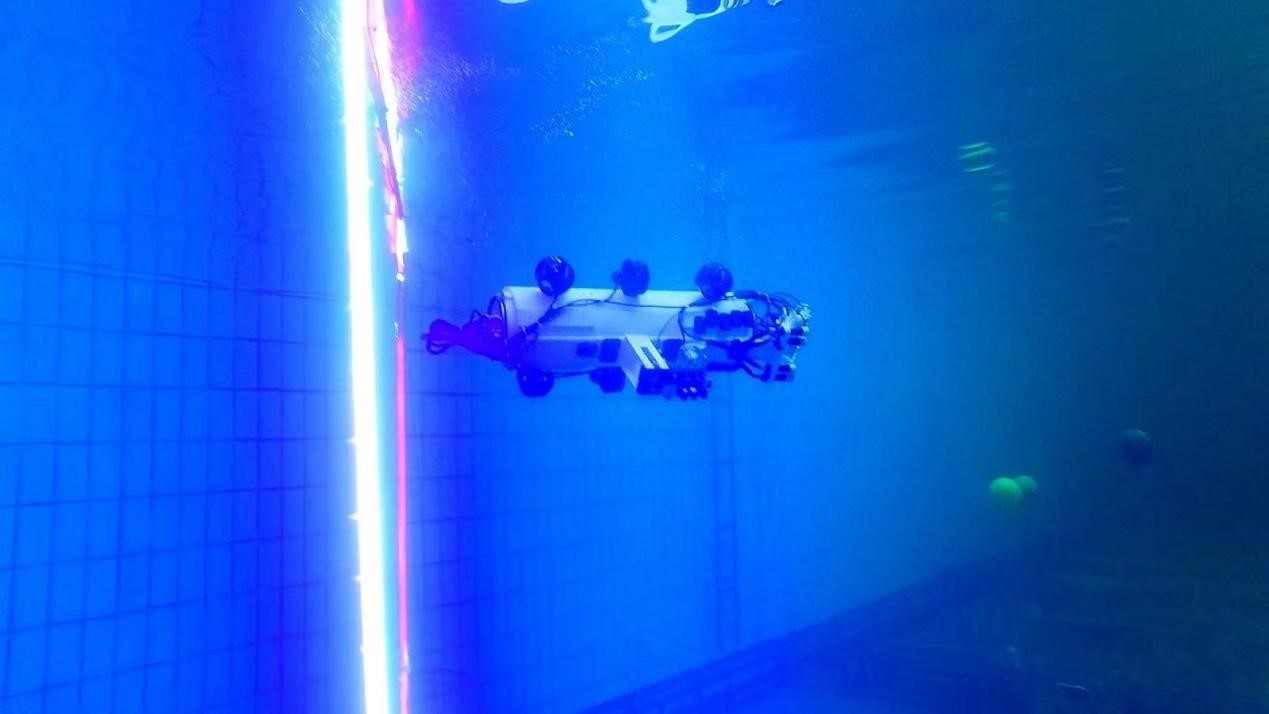
值得一提的是,哈尔滨工程大学团队研发的AUV(自主式水下机器人)领航鲸以满分成绩通过重重水下关卡,遥遥领先于其他团队,以绝对优势夺得AUV赛道冠军。
重约20KG的领航鲸以视觉感知系统为眼,声呐感知系统为耳,并具备智能决策的大脑与稳定航行控制的小脑,可有效避开浅滩暗礁,以编队形式为渔船领航。
大赛规定,机器人顺利过门即可拿到基本分,加入不同程度旋转动作可获取相应附加挑战分,横滚2周则可拿到满分。在水下第一关“过门”时,领航鲸以横滚两周的优美身姿惊艳亮相,在大部分团队选择只拿基本分的情况下,领航鲸在第一关以满分成绩遥遥领先。
团队将自主研发的领航鲸闯第一关
在撞球环节,水下赛道有红、黄、绿三种颜色浮球,团队要在下水前抽签,根据所抽取的颜色顺序使机器人在水中依次撞击浮球。一般采用预设航程点的机器人很难完成此项任务,而领航鲸因为具备准确可靠的智能感知与视觉DP(动力定位)能力,可有效完成自主搜探与撞球任务,因此,在这一环节,领航鲸再一次以满分成绩顺利闯关。
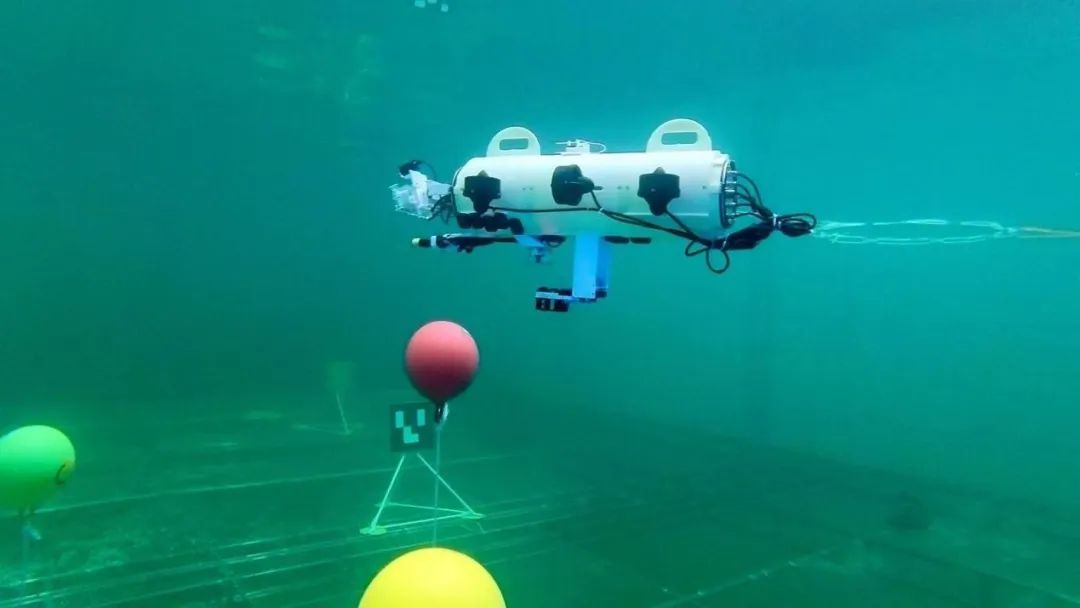
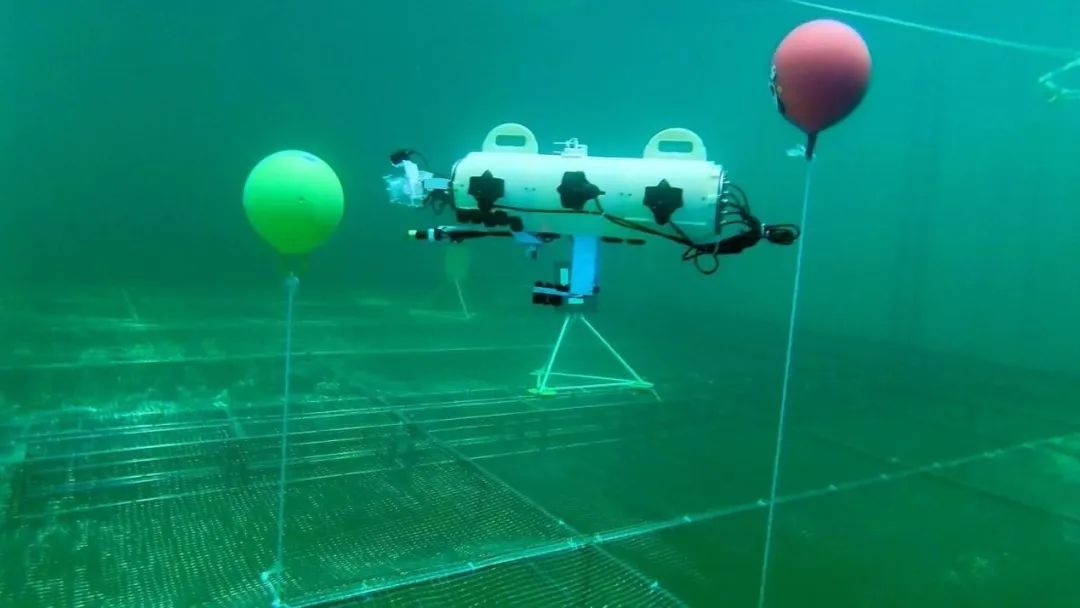
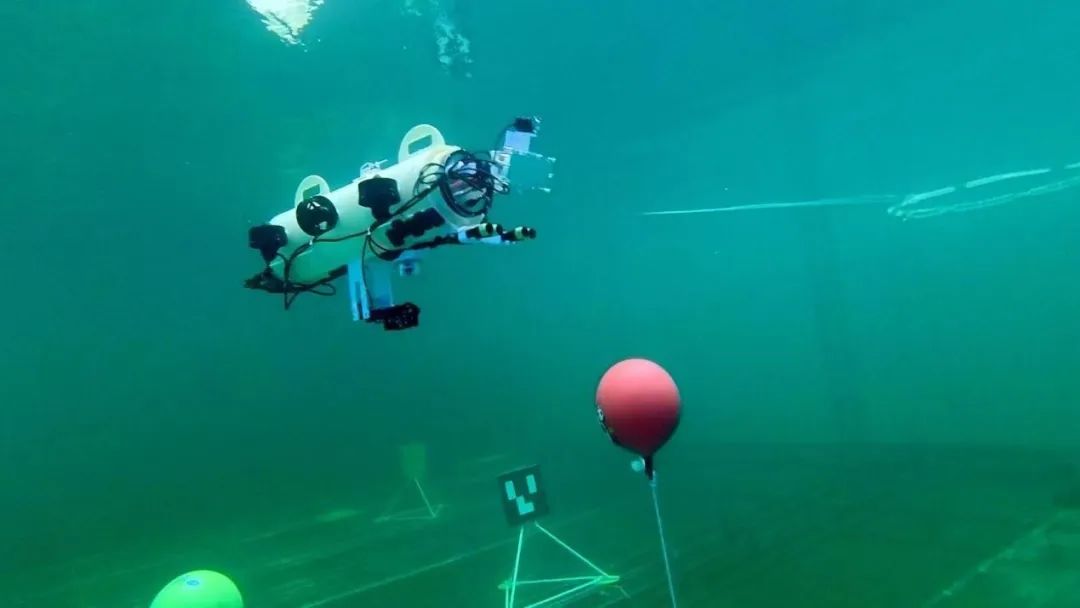
领航鲸在撞球环节以满分成绩顺利闯关
团队负责人方亮介绍,AUV的关键在于态势感知与自主决策规划控制能力,在未知非结构化环境和非预设态势下完成自主搜探作业任务,十分考验AUV的智力水平与自主能力,团队所构建的前端智能感知、融合决策与任务自主靶向导引系统可有效完成期望目标搜探任务。
领航鲸不仅有眼睛和智慧的头脑,它的听觉系统也十分灵敏。在听声浮圈环节中,机器人要通过37.5kHz声源引导到达终点圈下方,而后在1.5m直径边框中精准上浮,正是因为搭载了先进的声呐系统、具备精准的俯视DP能力,领航鲸精准出圈,顺利完成闯关。

领航鲸团队
领航鲸团队仅有9人,他们来自哈尔滨工程大学智能科学工程学院、水声工程学院、青岛创新发展基地,有硕博生,也有本科生,指导教师为严浙平、陈涛、张居成教授。负责人方亮介绍,AUV的设计难点在于无人系统总体体系结构的构建,既要考虑大脑的感知能力与算力,亦要考虑平台的载荷搭载与自稳能力。团队的目标就是要进一步提升AUV集智能感知-自主导航-融合决策于一体的无人自主智能化水平,本次赛事的实践证明,领航鲸已经具备了这一能力。
“接下来,团队还计划将领航鲸微小型水下无人潜航器的相关技术在实际工程化中落地应用,以赋能增强水下近抵观测与低成本自主巡航能力,有效提升水下无人系统智能化水平,为国家重大需求贡献青春力量。”方亮说。
哈尔滨工程大学校长助理赵玉新表示,世界大学生水下机器人大赛,致力于构建中外青年学子在水下机器人创新领域交流的平台,促进水下智能技术装备创新发展和人才培养能力持续提升。首届大赛的成功举办,为后续发展积累了良好开端,开创了大学生科技创新领域的新赛事、新平台。

哈尔滨工程大学校长助理赵玉新

